My first approach to the world of graphics programming.
Important
I've learned a lot since I started this project, and I decided to do it again from scratch, applying the lessons from my mistakes. I won't delete this post because I think it is valuable to have a record of the errors that I encountered and their solutions. This post is not up to date with the project; Now we have paralelism, links and sprins, we can also render more than 100K objects. I'will update it soon
Computer graphics is a fascinating field of computer science. Who would have thought that, with just a couple of functions and basic physics principles, we could create fairly accurate simulations of real-world natural systems? I'm by no means an expert in this field, but I would like to become one in the future.
This is my first attempt at graphics programming using OpenGL. I hope you find this article useful or interesting, at least. Enjoy! Source code.
What is this project about?
My goal was learning OpenGL basics. I used C++ to create a particle simulation, which has three main parts:
- Particles: Each particle is an instance of the same particle object. They have velocity, acceleration, position, color, mass, among others.
- Collision handler: Its function is detecting collisions between particles and with the environment and modifying the particle's position, velocity, and acceleration accordingly.
Main file: It is where everything comes together to run the program. Its main function contains an "infinite" loop to execute each step of the simulation.
Additionally, I added some basic controls:
- W, A, S, D: Change gravity direction.
- R: Restart the simulation with the samee set of particles.
- N: Generate a new set of particles.
Libraries that I used:
- GLFW: It is a library that lets us create and modify OpenGL windows and receive inputs from the peripherals.
- Glad: As most OpenGL functions' locations are not known at compile-time, they need to be queried at run-time. Glad solves this issue by managing these function pointers.
- Glm: An OpenGL-specific math library.
How does each part work?
- Particles:
Every particle has the following attributes:- Position.
- Velocity.
- Acceleration.
- Mass/Radius (the radius depends on the mass).
- Color.
They are randomly generated and stored into an arra
Collision handler:
Its job is to detect collisions and respond according laws of physics, ensuring that the particles interact realistically with each other and with the boundaries of the simulation environment. The Collision Handler consists of two main functions: handleBorderCollisions and handleParticleCollisions:Border Collisions: The handleBorderCollisions function detects collisions between the particles and the boundaries of the simulation area. If a particle collides with a border, its velocity in that direction is inverted and a damping factor is applied to simulate the loss of energy in the collision.
void CollisionHandler::handleBorderCollisions(Particle& p) { std::array<float, 2> velocity = p.getVelocity(); std::array<float, 2> position = p.getPosition(); if (abs(p.getXPosition()) + p.getRadius() > width/2) { // Reverse velocity and apply damping position[0] = (width/2 - p.getRadius()) * sign(position[0]); velocity[0] *= -1 * borderCollisionDamping; } if (abs(p.getYPosition()) + p.getRadius() > height/2) { // Reverse velocity and apply damping position[1] = (height/2 - p.getRadius()) * sign(position[1]); velocity[1] *= -1 * borderCollisionDamping; } p.setPosition(position); p.setVelocity(velocity); }Particle Collisions: If the distance between two particles is less than the sum of their radii, it means that they collided.
bool CollisionHandler::collide(Particle p1, Particle p2) { return (calculateDistance(p1, p2) <= p1.getRadius() + p2.getRadius()); }The handleParticleCollisions function detects collisions between individual particles. If two particles collide, the new velocity of each particle is calculated using the laws of conservation of momentum and energy. Additionally, a damping factor is applied to model the energy loss in the collision.
void CollisionHandler::handleParticleCollisions(Particle& p1, Particle& p2) { // variable declarations // ... if (&p1 != &p2) { //It avoids comparing a particle with itself if (collide(p1, p2)) { //if there is a collision //distance between centers std::array<float, 2> diff_x; diff_x[0] = xp1 - xp2; diff_x[1] = yp1 - yp2; float dot_product = (xv1 - xv2) * diff_x[0] + (yv1 - yv2) * diff_x[1]; float norm_squared = diff_x[0] * diff_x[0] + diff_x[1] * diff_x[1]; //Formula to calculate the new velocity of the particle float new_xv1 = (xv1 - (2 * m2 / (m1 + m2)) * dot_product / norm_squared * diff_x[0])* particleCollisionDamping; float new_yv1 = (yv1 - (2 * m2 / (m1 + m2)) * dot_product / norm_squared * diff_x[1]) * particleCollisionDamping; //Update particle's velocity p1.setVelocity({ new_xv1, new_yv1 }); p1.setPosition({ xp1 - (p2.getPosition()[0] - p1.getPosition()[0])/10, yp1 - (p2.getPosition()[1] - p1.getPosition()[1])/10 }); } } }Position Update: The updatePositions function is responsible for updating the positions of the particles at each simulation step. First, it updates the properties of each particle, such as velocity and position, according to external forces like gravity. Then, using the previously mentioned functions, it checks for collisions with the boundaries and between the particles themselves, adjusting positions and velocities accordingly.
void CollisionHandler::updatePositions() { for (Particle& p : particles) { // Update particle properties p.setXVelocity(p.getXVelocity() + p.getXAcceleration() * dt); p.setYVelocity(p.getYVelocity() + p.getYAcceleration() * dt - gravity * dt); p.setXPosition(p.getXPosition() + p.getXVelocity() * dt); p.setYPosition(p.getYPosition() + p.getYVelocity() * dt); // Check border collisions handleBorderCollisions(p); // Check particle collisions for (Particle& p2 : particles) { handleParticleCollisions(p, p2); } }}Other functions: In addition to the main functions, the Collision Handler includes auxiliary functions to calculate distances, dot products, and normalize vectors. These functions are used in the computation of collisions between particles. you can check them out Here.
The graphics pipeline:
To understand the rendering part, we first have to know how OpenGL works. It uses a rasterization pipeline to go from an array of vertices specified within the program to an image on the screen:
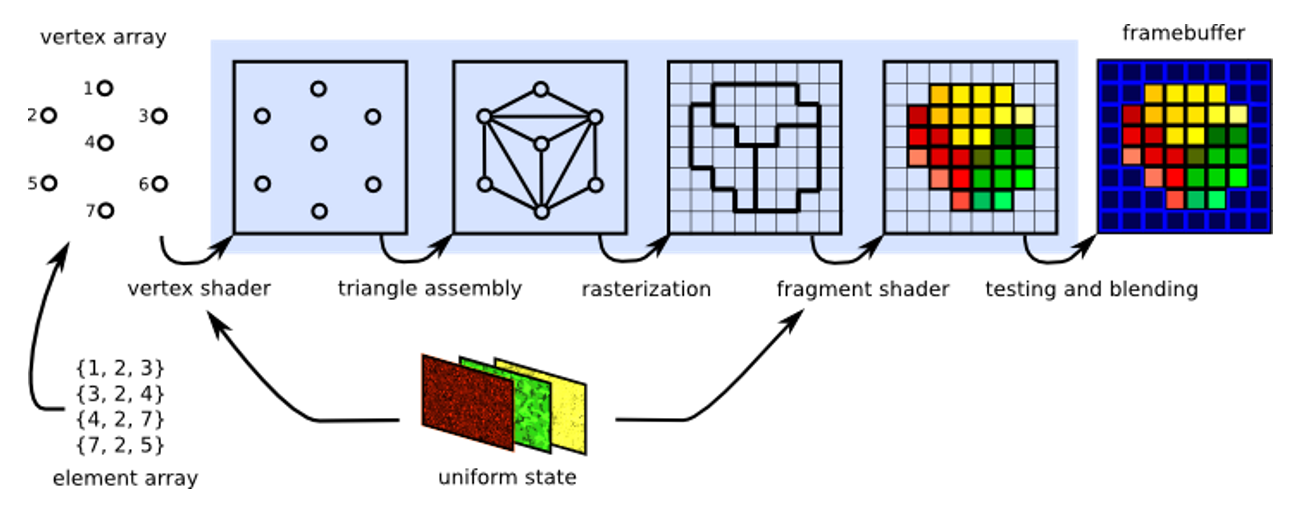
- Vertex Shader: Takes the vertex information and transforms it if necessary (for example, to apply perspective).
- Shape Assembly: Takes the resulting positions from applying the vertex shader and connects them according to a primitive (point, line or polygon). In this case, triangles.
- Rasterization: The shapes generated previously are translated into pixels that can be displayed on the screen.
- Fragment Shader: Computes the expected color of each pixel of the primitive.
- Test and Blending: In case of having overlapping objects, their colors are "blended" depending on their opacity and other factors.
- Particle rendering:
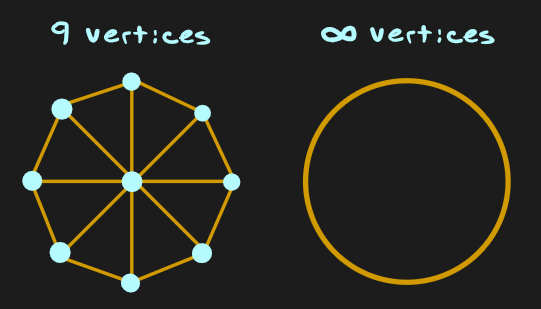
Now that we understand how OpenGL works, we can delve into the details of how I managed to show the particles on the screen. In this case, I used triangular primitives to render my circular particles. To achieve this, I divided the circle into segments, similar to slicing a pizza, placing vertices along its perimeter and drawing triangles between them and the central point, the more vertices we add, the better resolution the circle has:
To do so, I first had to generate an array with the vertex information of a circle:
std::vector<float> vertices;
for (int i = 0; i < steps; ++i) { //steps is the amount of vertices that we will calculate
float x = radius * cos(angle * i);
float y = radius * sin(angle * i);
vertices.push_back(x);
vertices.push_back(y);
}
Then, I created and configured the Vertex Buffer Object (VBO) to store the vertex data and the Vertex Array Object (VAO) to organize and configure that data for processing and rendering.
Buffers are useful because they can be used to send large amounts of data to the GPU, which makes the transfers faster. They also allow for more efficient memory usage since the data resides directly in the GPU's memory, where it's needed for rendering.
Once the configuration is complete, I created a for loop that iterates through the vector of particles and applies a translation transformation to the circle vertices based on each particle's position. This approach allows us to render multiple particles using a single set of vertices.
I'm not displaying the code here because it's pretty standard, but if you're interested, you can check the Source code.
Entry Point (main function): This is where all the parts come together. After the initialization is done, the main function executes the main loop, where the simulation occurs.
int main() { // GLFW initialization // ... // GLFW Window creation // ... // Glad initialization // ... // Particle array creation std::vector<Particle> particles; // ... // Collision Handler initialization CollisionHandler handler(particles, width, height, deltaTime, gravity); // Shaders and buffers creation // ... // Main loop, rendering and update while (!glfwWindowShouldClose(window)) //while the window is open { // User imput processInput(window, handler, particlesRestore); // Particle position update handler.updatePositions(); // Particle rendering //... // OpenGL functions to manage buffers and events // ... } // GLFW Termination // ... }In this code snippet, a main loop is created that runs until a window close request is detected. During each iteration of the loop, user input is processed, the scene is rendered, particle positions are updated through the Collision Handler, and GLFW events are managed.
Things to improve:
Even though the program works fine, there are many things that could get better, such as the collision detection and handling algorithm. The current algorithm has a cost of O(n^2), which is far from optimal.
Additionally, the simulation currently runs on a single core of the processor.
Here are some possible solutions to these problems:
Improved collision detection:
- Spatial Partitioning: Collisions can be calculated using a fixed grid to separate the environment into cells. Then, collisions would only be checked if two particles are in the same cell or in contiguous ones.
Parallel processing:
- Multithreading: The workload can be divided across multiple CPU cores, drastically enhancing performance.
- Compute Shaders: We can use the GPU for general-purpose computing. It is designed to execute complex calculations at a much faster rate compared to traditional CPU processing. The parallel computing capabilities of compute shaders are useful to significantly improve the performance of the simulation.
Conclusions:
I had a great time exploring the fundamental concepts of physics and computer graphics. Despite having accomplished my goal of creating a simple particle simulation, now that I've learned so much, I feel the next step is applying this knowledge to improve performance, introduce interactive elements for users, enhance the visual representation of particles, or even create more complex simulations. Perhaps demonstrating a Gaussian distribution or refining the particle object for a fluid simulation. Stay tuned—I'll keep working on it!
Updates:
There are some things that I didn't notice when I was writing the article. I'm working to fix these errors:
Data structures: Particle attributes are stored inside vectors, which are dynamic data structures that can change size during execution. This means they need to keep track of data positions because the data is not stored contiguously in memory. This is inefficient and can be improved by simply changing the data structures to arrays, which are statically defined at compile time and don't need to keep track of memory positions because the data is stored contiguously in memory. Learn more about it. Solved! - 5/14/2024
Getters should be declared as const: This is a common practice in C++ which I didn't know about at the moment of writing the program. Declaring the getters as const functions guarantees that they are not going to modify the state of the object they belong to. Solved! - 5/14/2024
Module responsibilities: The function draw() from Particle is called by the collision handler. This is not correct because the collision handler's only responsibility should be updating particle positions. A way to fix this could be creating a separate object responsible for rendering the particles on the screen after each position update. Solved! - 5/18/2024
Draw function: My biggest mistake lies in the way I'm drawing the particles, and it goes hand in hand with the previously mentioned mistake. I'm currently compiling and binding the shaders and defining vertex positions for all the particles inside the draw() function on every iteration of the program. This is not good for performance and it shouldn't be done this way. We only need to compile and bind the shaders once, then we can use translation transformations to move the particles according to their position attribute. Solved! - 5/18/2024
Bug in the collision algorithm: The way I calculate particle positions in the simulation introduces a lack of full determinism, which means there's a chance of producing different results for the same input. Currently, I calculate and assign positions for each particle one by one. The better approach would be to compute the next position for all particles simultaneously, and then assign those positions to each particle at once. I might leave this as it is and solve it if I re-do the project from scratch
This is how it looked before fixing this problems:
As you can see, now we can simulate MORE THAN ONE HUNDREAD TIMES the ammount of particles we could then.
Relevant links:
- Source code: Github repository with the project files.
- Victor Gordan: Great graphics programming YouTube channel.
- LearnOpenGL.com: The perfect E-book to start learning OpenGL.
- "Writing a Physics Engine from scratch - collision detection optimization": A video I watched to learn about particle collisions.
- Video: "Coding Adventure: Simulating Fluids": Another video with a nice explanation of how particle simulations work.